电永磁机械手(EPM688)¶
本文将介绍如何使用 电永磁机械手(EPM688) 使用 ArduPilot。
概述¶
"这款" EPM688 (来自 NicaDrone.com)是一款小型(小于 4 厘米 x 4 厘米 x 2 厘米)电磁永磁抓取器,能够承受 7 千克的力,这意味着它可以抓取约 1 千克的货物。货物的抓取和释放是通过向电磁铁发出短脉冲使其磁场反转来实现的。它能抓取的物体必须是金属的,或具有以下特征 方形薄钢靶 附属于它们。
该装置接受标准 PWM 伺服输入,使用 5V 电源。仅在首次抓取或释放货物时的不到 1 秒钟内需要大量电源。
连接到 Pixhawk¶
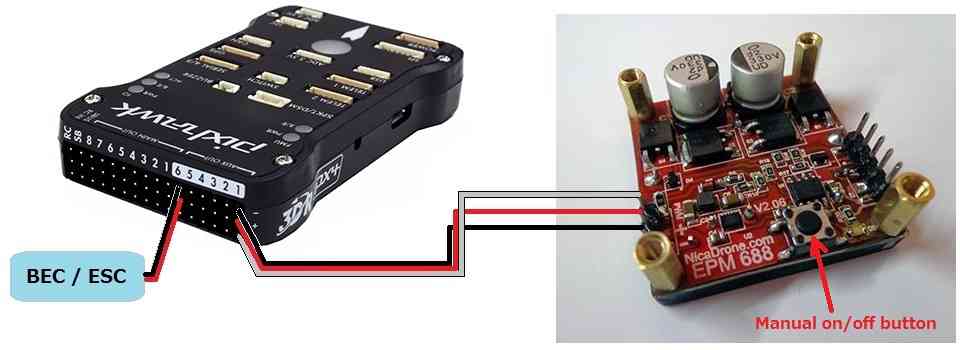
EPM 与 Pixhawk 的连接方式与 Pixhawk 的连接方式相同。 伺服器.
如果使用 Copter,请将 EPM 连接至 AUX OUT 1、2、3 或 4。主输出 1 ~ 8 不能使用,因为 EPM 不接受 400hz 的更新率。不能使用 AUX OUT 5 和 6,因为它们被保留用于 继电器.
如果使用 Plane 或 Rover(所有 pwm 引脚均以 50hz 频率更新),则可使用任何未使用的主输出端或辅助输出端 1 ~ 4。
应使用 BEC 或 ESC,其 5V 电压可在抓取器首次启动闩锁货物的短时间内提供 600 毫安的电流。
使用伺服直通功能从发射机进行控制¶
遗憾的是,在最新版本的 Copter、Plane 和 Rover 中,EPM 可以通过发射器控制,也可以在执行任务时控制。二者皆可,但需要更改参数,这意味着在一次飞行中无法同时使用两种方法。以下是通过发射机设置手动控制的说明。
使用发射机进行控制是通过设置 "RC 直通 "来实现的,这意味着发射机的 "输入 "通道将通过(飞行)控制器的相同数字 "输出 "通道。对于 Copter 而言,这意味着您的发射机必须具有 9 个或更多通道,因为 EPM 连接到输出通道 9(或更高)。
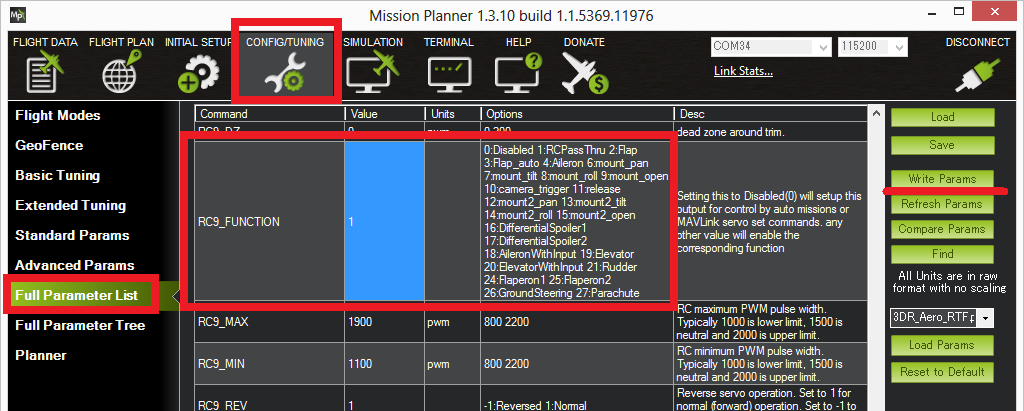
假设您的设置可以实现上述操作,请连接Mission Planner地面站。进入 "配置/调整 >>完整参数列表",设置 servo9_function (或 RC9_FUNCTION)设置为 "1"(即 "RCPassThru")。请注意,如果 EPM 连接到 AUX OUT 2,则 servo10_function 等。
在发射机上将 CH9 设置为由 3 位开关控制,位置设置如下:
低位置设置为约 **1100 pwm*.这将释放货物*。
中间位置设置为约 **1500 pwm*.这是中立位置,将开关拉高或拉低以抓住或松开后,开关应回到该位置*。
高位设置为约 **1900 pwm*.这将激活 EPM,使其紧紧抓住货物*。
要抓住货物,请将货物靠近 EPM,并瞬间将开关置于高位,然后将开关置于空档。
要释放货物,请瞬间将开关置于低位,然后将其置于空档位置。
请注意 旋翼飞行器 Ch7/Ch8 开关 包括 EPM 的选项,但遗憾的是,这些选项无法正常运行。
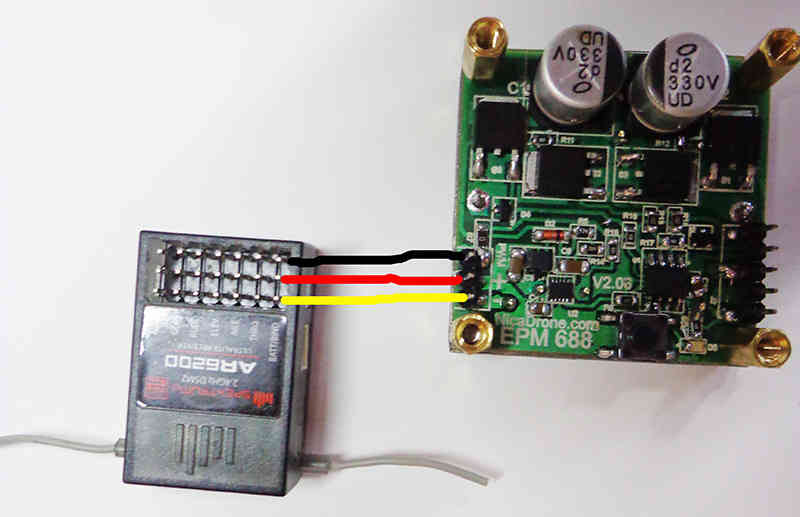
注意: 也可以(如果使用的是旧式的非 ppm-sum 接收器)将接收器的一根信号线直接连接到 EPM 的 PWM 引脚,从而完全绕过(飞行)控制器。下图显示了接收器和 EPM 之间的电源线连接,但这是不正确的,而且相当危险,因为电源尖峰可能会通过接收器到达(飞行)控制器。只应连接 PWM 和地线。EPM 应由 BEC 供电(如下图所示)。
在执行任务期间和从 GCS 进行控制¶
如上所述,EPM 可通过发射器或地面站进行控制(包括在执行任务期间,又称 "飞行任务")。 自动模式),但不能在同一次飞行中同时进行。下面是通过地面站设置控制的说明。
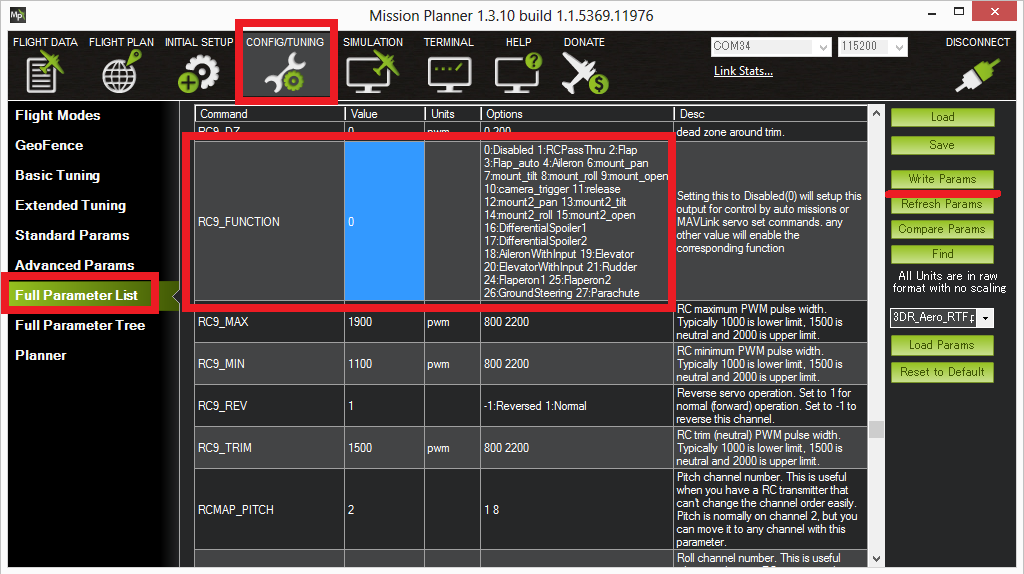
连接Mission Planner地面站。转到 "配置/调整 >>全参数列表 "并设置 servo9_function (或 RC9_FUNCTION)设置为 "0"(默认值)。请注意,如果 EPM 连接到 Pixhawk 的 AUX OUT 2,那么 servo10_function (或 RC10_FUNCTION),等等。
创建您希望执行的飞行任务,并添加一对 DO_GRIPPER
每次发出指令后,EPM 都会返回空档。
"序列号 "应根据 EPM 所连接的输出设置(即 "9"= Pixhawk 的 AUX OUT 1,"10"= APM2 的 RC10)。
"PWM" 应设置为 1100ms 释放货物、 1500ms 恢复中立,以及 1900ms 抓紧货物。
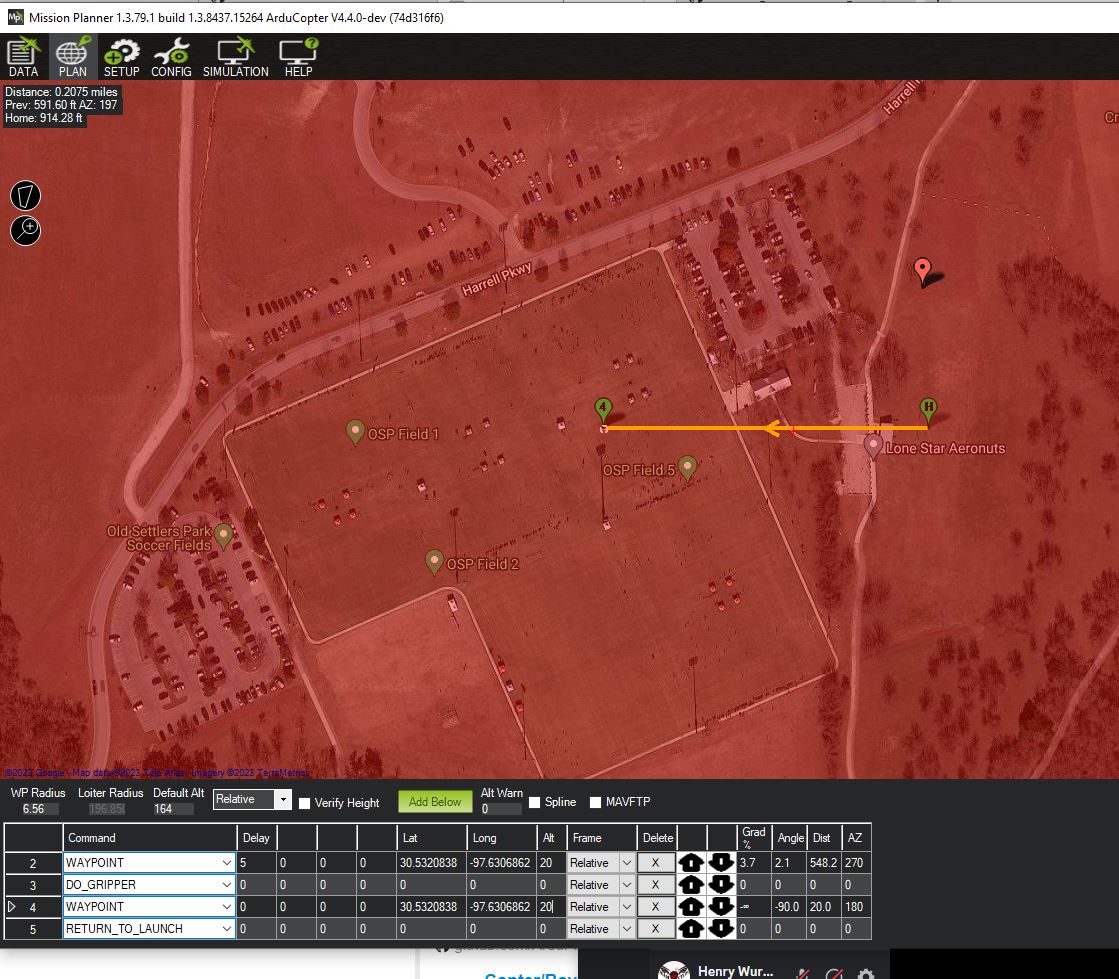
在上面的例子中,飞行器起飞到 20 英尺处,向西飞行 548 英尺,在那里停留 5 秒钟,释放货物,再停留 5 秒钟,然后返回原地。
为了在任务开始前提取货物,请按下 EPM 上的黑色圆形按钮将其瞬间打开。一个麻烦的替代方法是使用Mission Planner地面站飞行数据屏幕的 "伺服 "选项卡,将输出瞬间设置为 1900 pwm(即下图中的 "高"),然后再返回中性(即下图中的 1500 或 "低")。

规格和更多信息¶
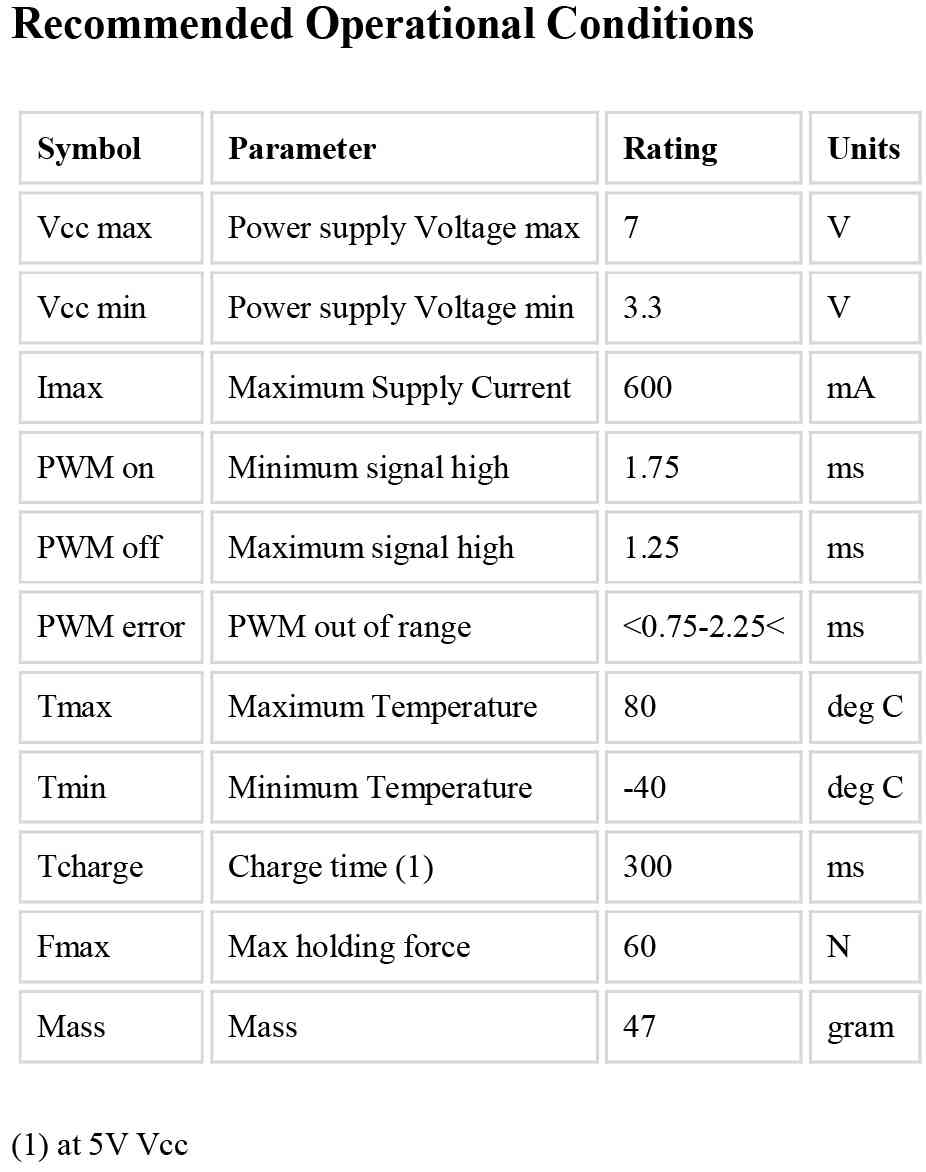
EPM 板载 PIC12F MCU,带有一个电路编程接头,便于重新刷新。
在首次抓取或释放货物时,会在 0.4 秒内消耗 400 毫安的电流。大部分能量用于将目标移动到位,其余能量用于重新调整磁铁。执行切换周期时,板载 LED 会快速闪烁 4 次
板载触觉按钮:允许在仅连接电源的情况下切换测试 EPM 的开/关
全桥 Thyrisotor 驱动电路提高了效率,缩小了电容器尺寸。
减少磁场干扰,可安装在罗盘 5 厘米范围内(请根据应用进行测试)
磁干扰和电路板电压检查¶
EPM 可能会造成磁场干扰,尤其是在抓取或释放货物时,或者在未连接货物的情况下处于 "打开 "状态时。请确保将 EPM 安装在距离飞行控制器指南针至少 10 厘米的地方。
EPM 对罗盘的影响可通过连接Mission Planner地面站进行实时测试,进入 "飞行数据 "屏幕,点击底部中间的 "调整 "复选框。双击右上方出现的图表,在出现 "Graph This(此图表)"窗口时选择 "magfield(磁场)"。
打开和关闭 EPM,确保磁场长度的变化不超过 10%。

除磁场干扰外,如果使用较弱的 BEC,可能会出现电压下降。例如,当启动 EPM 时,3DR ESC 中的 BEC 会导致电压下降 0.4V。这通常不是问题,因为 BEC 只为(飞行)控制器的伺服轨供电,所以 CPU 的电压应该不受影响。这可以通过绘制 "hwvoltage "字段图进行测试,方法与上述检查 "magfield "字段的方法相同。理想情况下,该测试应在通过以下设备连接时进行 遥测因为 USB 电缆也会为 CPU 供电,可能会隐藏任何电压干扰。