存档:罗孚 APM2.x 接线和快速入门¶
警告
存档
与 ArduPilot 一起使用的 APM2.x 已经报废。本文供现有用户使用。
本文介绍如何使用 APM2.x (飞行)控制器设置 Rover。
概述¶
将遥控车改装为漫游车的过程包括在遥控接收器与车的电机和转向伺服器之间添加一块自动驾驶板。我们建议使用随附的电源模块为控制器供电。
备注
本教程假定您使用的是模式 2 无线电设置。如果您使用的是模式 1,油门会移动到另一个摇杆上
Rover 设计用于使用普通遥控发射器(非专用遥控车发射器),在模式 1 中,油门和转向均位于右摇杆上;在模式 2 中,油门和转向均位于左摇杆上(通常是升降杆)。这是因为遥控车通常既可前进也可后退,因此油门应通过弹簧加载返回中点。不过,如果您使用的不是遥控车电机控制器(ESC),而是普通的飞机电机控制器(ESC),而后者通常没有反向功能,那么您可以将油门放在左摇杆上,就像飞机通常使用的那样。
为UGV无人车提供动力¶
为 APM2.x 供电的最简单方法是使用 3DR 电源模块 使用锂电池。
电源模块无法为舵机和其他外围设备供电。有关更多信息/替代方案,请参阅 为 APM2 供电.
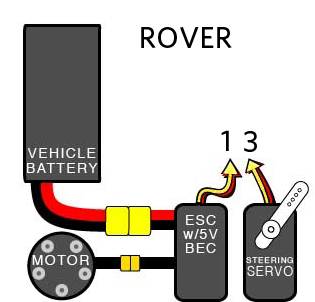
遥控设置¶
如下图所示,将遥控系统连接到 APM:
输入通道
RC Rx |
APM 输入 |
功能 |
1 |
1 |
转向系统 |
2 |
3 |
节流阀/电门 |
5 |
8 |
模式 |
6 |
7 |
记录航点 |
输出通道:
对于使用伺服器转向的标准遥控车,请使用载具设置。但是,如果您的坦克或其他载具在两侧使用不同速度的电机来转向,则应使用 "滑移转向器 "设置。
APM 输出 |
载具 |
滑移装载机 |
1 |
伺服 |
左电机 |
3 |
电机/ESC |
右电机 |
重新分配遥控发射机杆通道¶
默认的发射杆配置几乎适用于所有情况。如果确实需要更改,请参阅 RCMAP 输入通道映射.
将其安装在载具上¶
下图显示了小型漫游车的典型设置,使用了 APM2.x、3DR 无线电遥测技术以及声纳和红外传感器(设置说明如下 这里).注意几个要素:
遥控车的塑料车身外壳已被拆下,并切割和钻孔了一块胶合板以安装在安装柱上。
APM2.x 的平台由以下四个部分组成 30 毫米尼龙垫片四 5 毫米尼龙螺丝和一个 旋翼飞行器堆叠板.这是为了确保 APM 上敏感的罗盘传感器尽可能远离载具电机的磁噪声/干扰。
APM、GPS、3DR 无线电和遥控接收器均由 APM 电源模块(随 APM 套件提供)供电。载具的转向伺服器由载具的速度控制器供电。这是标准设置,不需要任何特殊设置或配置,但对于那些想知道功率的人来说,这就是答案。除其他优点外,使用 APM 电源模块意味着 APM 可以进行电压和电流检测,并在运行过程中将电池状态报告给地面站,还可以记录数据,以便运行后进行分析。
目前使用的电池比载具最初设计的容量更大(因为漫游车的设计目的是进行长距离越野行驶),而且电池安装在 APM 平台下的魔术贴上,因此不会移位。

根据您所使用的车架,您可能希望以不同的方式设置您的设备。几乎任何配置都可以使用,但只需记住让 APM 尽可能远离磁干扰源!下图是汤姆-科伊尔(Tom Coyle)的 Slash Rover(2013 年 AVC 自行车组冠军)的俯视图,配有 Spektrum 接收机、GPS 和外部指南针。

带机载指南针的 3DR GPS uBlox¶
带板载指南针的 3DR GPS uBlox 适用于 APM2.x(外置指南针)。由于可以不受 APM 位置的影响,自由地将 GPS 设备放置在最佳位置,因此罗盘性能更强。

将 GPS 放置在漫游车上的高处,箭头朝前(朝向漫游车的前方)。使用 GPS 随附的两条电缆将 GPS 模块连接到 APM,如下图所示。
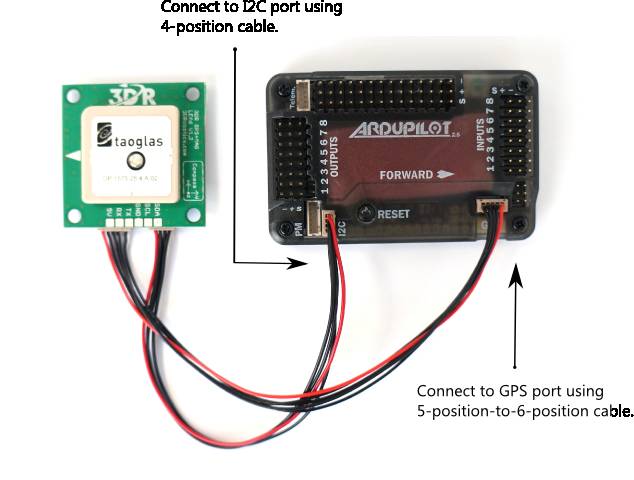
带板载指南针的 3DR GPS uBlox 包含两条连接器电缆:一条 4 位电缆和一条 5 位到 6 位电缆。要将 GPS 模块连接到 APM,请使用 5 位到 6 位电缆将 GPS 连接到 APM GPS 端口;使用 4 位电缆将 GPS 连接到 APM I2C 端口。
Slash Rover 的 GPS,配有外置指南针支架:¶

3DR GPS uBlox 不带机载指南针¶

要安装不带指南针的 GPS 模块,请安装到漫游车顶部,并使用 5 位到 6 位连接器电缆连接到 APM GPS 端口。
下一步: 加载 Rover 代码并进行配置