Xacti 云台¶
"这款" Xacti 摄像机云台 是相对较轻的三轴相机云台,可使用 DroneCAN 协议与 ArduPilot 通信。可通过 HDMI 和 USB 模拟输出实时视频。拍摄的图片包括使用 EXIF 保存的载具位置(纬度、经度、高度)。

支持的四种型号是
CX-GB100 : 20MP RGB
CX-GB200:1200 万像素 RGB + 640x512 像素 IR
CX-GB300 : 多光谱 NDVI
CX-GB400:1200 万像素 RGB,2.5 倍光学变焦
备注
ArduPilot 4.5.0(及更高版本)支持这些云台
部分图片由 xacti-co.com 提供
购买地点¶
这些万向节可直接从以下网站购买 Xacti
兼容的连接器和跳线可从 digikey 购买
连接(飞行)控制器¶
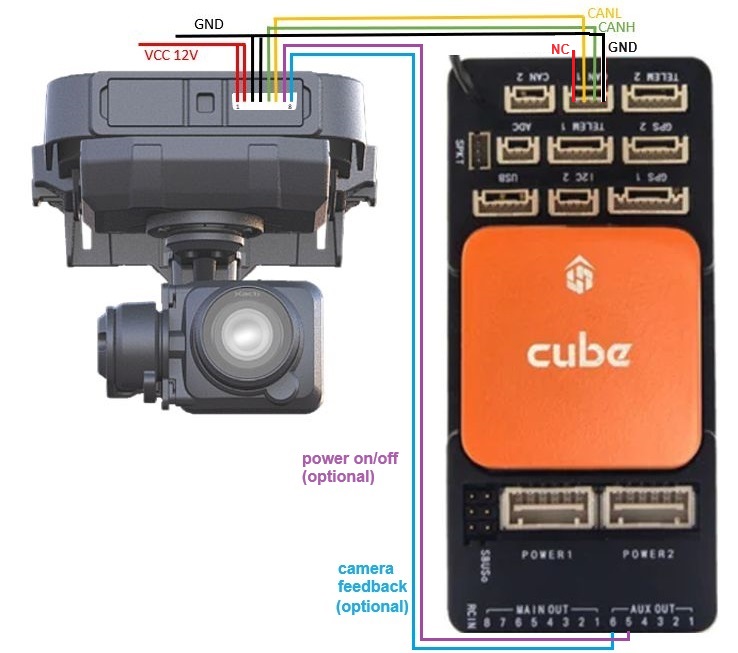
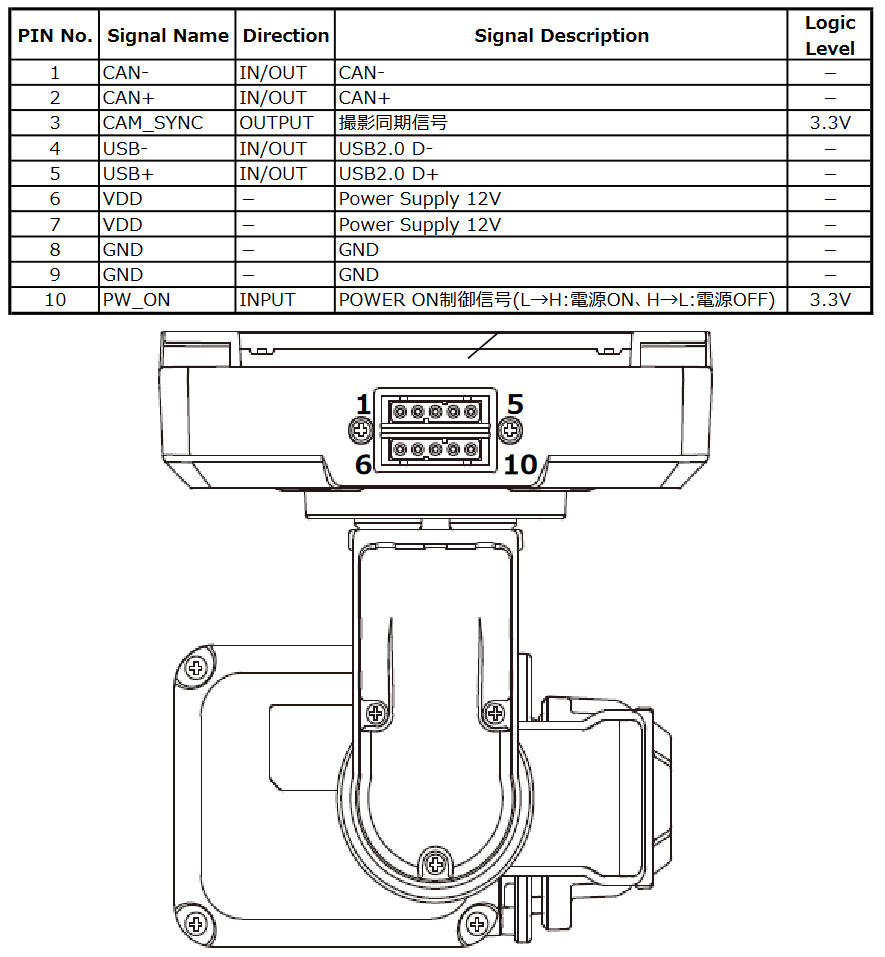
上图显示了在使用万向节安装板选项时,如何将万向节的 CANL、CANH 和 GND 引脚连接到(飞行)控制器的 CAN 端口之一。下图显示了相机的引脚布局,可与定制设计的支架一起使用。
用地面站连接(飞行)控制器并设置以下参数,然后重新启动(飞行)控制器。以下参数假定使用的是(飞行)控制器的 CAN1 端口、
can_d1_protocol 至 1 (DroneCAN)
CAN_D1_UC_NODE 改为 1(仅 2023 年 8 月之前的 Xacti 固件需要)
CAN_P1_DRIVER 至 1(第一驱动程序)
MNT1_TYPE 调至 10(Xacti)并重新启动(飞行)控制器
MNT1_PITCH_MIN 至 -90
MNT1_PITCH_MAX 至 25
MNT1_YAW_MIN 至 -90
MNT1_YAW_MAX 至 90
MNT1_RC_RATE 至 30(度/秒),以便在使用遥控瞄准时控制万向节的速度
CAM1_TYPE 至 4 (安装)
cam1_intrval_min 至 1(秒)
RC6_OPTION = 213("安装俯仰角")通过 RC 通道 6 控制万向节的俯仰角
RC7_OPTION = 214("安装偏航")通过 RC 通道 7 控制云台的偏航角度
还可选择以下辅助功能
RC9_OPTION = 166("摄像机录制视频")开始/停止录制视频
RC9_OPTION = 168("相机手动对焦")调节焦距的远近
RC9_OPTION = 169("相机自动对焦")触发自动对焦
为提高存储在每张拍摄图像中的位置 EXIF 数据的准确性,可启用相机触发反馈功能,具体如下
将摄像头的 CAM_SYNC 线(上图中蓝色显示)连接到(飞行)控制器的一个 AUX OUT 信号针脚(例如 AUX OUT 6 的底排针脚)上
cam1_feedbak_pin 至 55(AUX6)(如果连接至 AUX 输出 6)
servo14_function 至 -1 (GPIO)(如果连接至 AUX OUT 6)
为了远程开启/关闭摄像机,可将 POWER_ON 引脚连接到(飞行)控制器上。 继电器引脚 (见上图中的紫色导线),然后设置以下参数(假设使用的是(飞行)控制器的 AUX OUT 5 引脚)
将摄像机的 POWER_ON 针脚(上图中紫色显示)连接到(飞行)控制器的一个 AUX OUT 信号针脚(例如 AUX OUT 5 底排针脚)上
RELAY1_PIN 至 54(AUX5)(如果连接至 AUX OUT 5)
servo13_function 至 -1 (GPIO)(如果连接至 AUX OUT 5)
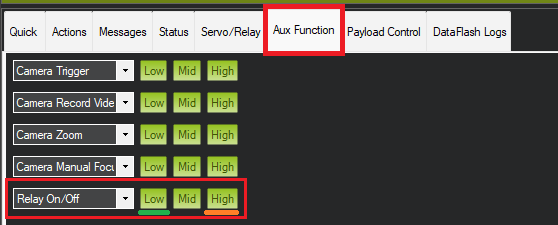
可以通过一个 辅助开关 或使用Mission Planner地面站的辅助功能屏幕。将继电器拉到高电平会关闭摄像机,拉到低电平会重新打开。
警告
当(飞行)控制器首次检测到 Xacti 万向节时,系统会显示 MNT1_DEVID 将被设置为一个唯一的数字,用于识别云台。如果将云台移到另一个 CAN 端口,可能需要手动设置 MNT1_DEVID 归零并重新启动(飞行)控制器,以便找到万向节。
控制和测试¶
附加设置¶
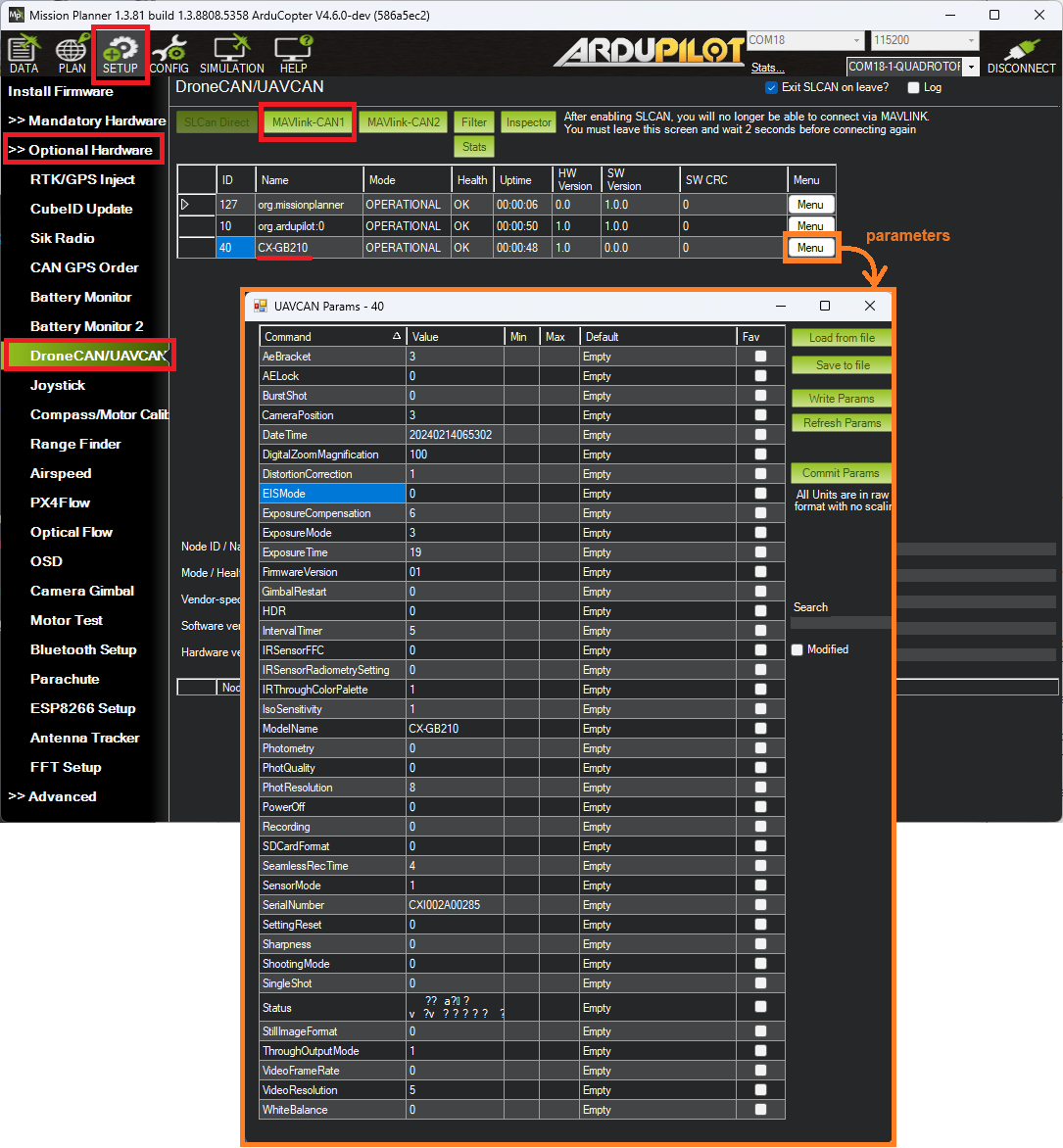
还有许多 ArduPilot 不直接支持的设置可通过 DroneCAN 更改。如果使用Mission Planner地面站,请使用 "设置"、"可选硬件"、"DroneCAN/UAVCAN "屏幕,如下图所示。
固件更新¶
固件更新可直接从 Xacti 获取,通常包括一个 "firmware.bin "文件和一个空的 "UPDATE.txt "文件。要更新摄像机,请
关闭云台电源并取出 SD 卡
将 "firmware.bin "和 "UPDATE.txt "文件复制到 SD 卡上
打开云台电源,等待至少 10 秒钟
可选择关闭云台电源,取出 SD 卡并检查 "firmware.bin "和/或 "UPDATE.txt "文件是否已删除。如果其中一个文件被删除,则固件更新成功
给万向节通电,它应能正常工作