集结点¶
概述¶
通常情况下,当飞机或旋翼飞行器进入 返回发射场 (RTL) 模式(通常由(飞行)控制器触发 故障安全),默认行为是返回到 主页点但在很多情况下,这样做并不可取。例如,这可能是一个充满人员或财产的区域,而在 RTL 模式下运行的系统很可能处于需要格外小心的状态!还有一种可能是,飞行计划足够大,如果飞机进入 RTL 模式,就不应该一路返回到起飞点。
因此,我们现在支持创建多个集结点。如果飞机进入 RTL 且已定义集结点,那么它将前往最近的集结点,而不是前往原点。飞机将在该位置位置悬停,而 Copter 将在该位置自动降落。

带有集结点的飞行计划。集结点用紫色标记表示。将鼠标移至一个集结点上,就会显示其停机高度(如上图中的中间点)。¶
设置集结点¶
以下步骤用于在Mission Planner地面站中指定集结点:
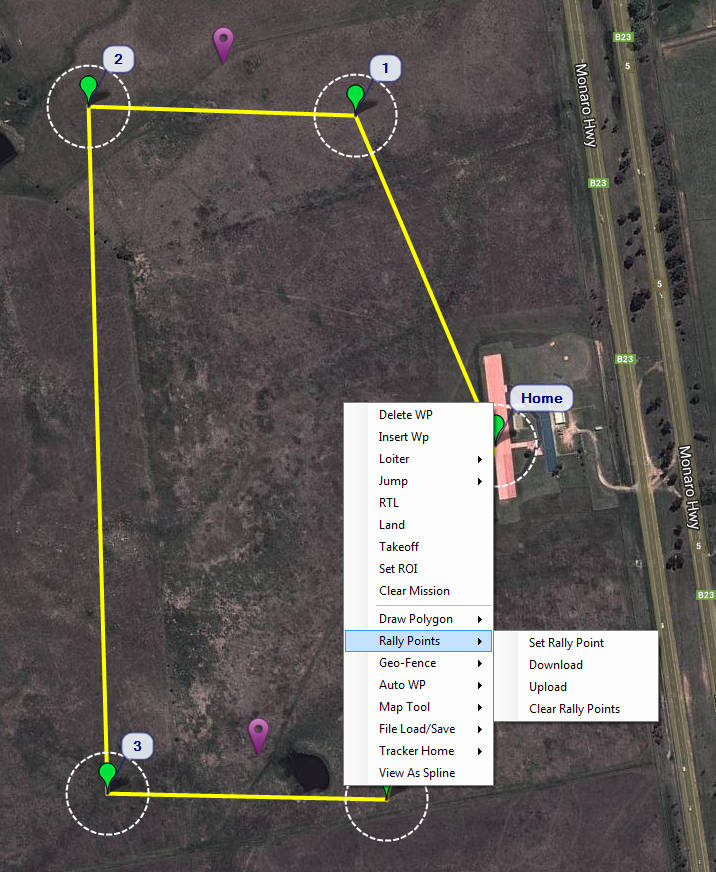
要设置集结点的位置,请在飞行计划地图上单击右键,然后在弹出的菜单中选择集结点>设置集结点(请注意,这只在飞行计划屏幕上有效,在飞行数据屏幕上无效):
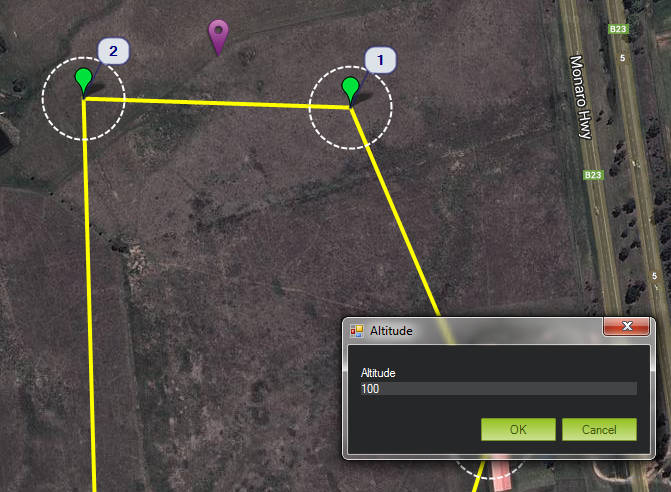
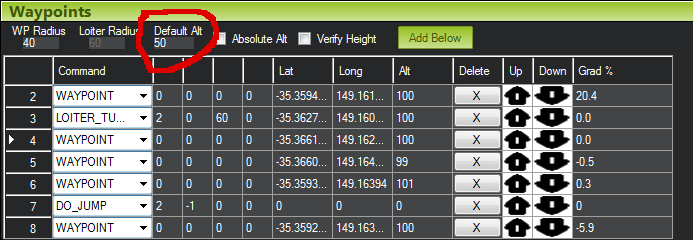
需要指定拉力赛空闲高度(注意,拉力赛点的默认高度是默认航点高度值,是相对于原点位置而言的):
对所有需要的拉力点重复上述步骤!
从右键单击弹出菜单中选择 "集结点 > 上传",上传至载具
使用集结点时应注意以下几点:
如果使用 地理围栏注意:强烈建议您在活动中使用的集结点位于地理围栏内。
确保集结点的高度足以清除地形和建筑物。
由于 APM2.x 硬件的闪存容量有限,因此飞机上的集结点数量限制为 10 个,旋翼飞行器上的集结点数量限制为 6 个。
在平面上,集结点的停机半径与所有其他停机点相同,由 WP_LOITER_RAD 参数。
"这款" RTL_ALTITUDE 或 RTL_ALT 参数不适用于集结点!飞机将以添加集结点时指定的高度飞往集结点。
以下 MAVLink 参数控制集结点行为:
RALLY_LIMIT_KM 是集结点与飞机的最大距离,可用于 RTL 赛事。如果所有集结点距飞行器的距离都大于这个距离,那么 RTL 事件将使用原点(高度为 0.5 米)。 RTL_ALTITUDE) 该参数用于在为多个飞行区域指定集结点时防止飞离。如果设置为 0,则可以禁用此参数。
集会首页 允许 "原点 "包含在 "集结号 "点数中,允许它在比任何 "集结号 "点数更近的地方返回 "原点"。
总计 是当前指定的集结点数量。当您添加和删除集结点时,地面控制站(如Mission Planner地面站)将为您设置该参数。 手动设置该参数的可能性很小,而且很可能不安全.如果没有指定集结点,则 RALLY_TOTAL 应该为 0,在这种情况下,RTL 事件将使用主位置。
飞行示例¶
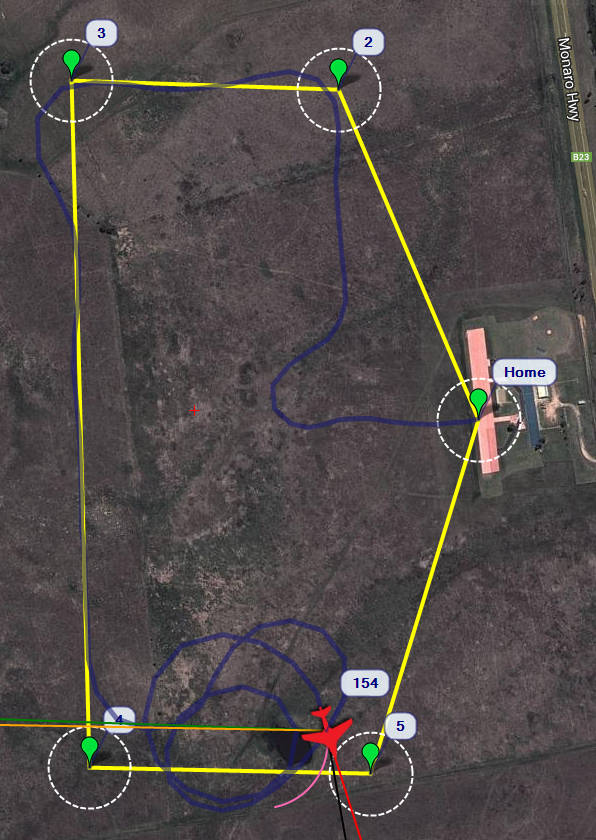
RTL 指挥的飞行接近航路点。飞机开始在最南端的集结点附近徘徊。¶
附录¶
拉力点文件中的 RALLY 字段如下:
纬度集结点的纬度
长集结点的经度
高度:集结点的 AGL 高度。
高度参考框架:用于 ALT 值:相对于原点、高于地形或绝对 ASL。