自主自转¶
本页介绍旋翼飞行器自动旋转飞行模式。为帮助理解该模式的工作原理,首先将提供基本的理论概述。随后将介绍如何设置和调整飞行模式。不过,由于该模式仍在开发中,因此提供了论坛主题的链接。该主题包含该模式创建时的所有最新信息。
备注
该飞行模式仅适用于传统旋翼飞行器。目前仅限于单旋翼旋翼飞行器。
警告
这是一个正在进行中的开发项目。该功能仅用于 SITL。请勿尝试在现实生活中使用此飞行模式。
自旋动作概述¶
传统旋翼飞行器能够在失去推进动力后安全着陆。在这种情况下,下降的飞机可以利用通过主叶片强制上升的气流来驱动旋翼,并仍然产生一些向上的推力。该动作的主要目的是利用飞机的剩余能量使飞机安全着陆,实现软着陆。
演习可分为几个阶段。关于这些阶段的细分和描述,现有的相关文献各有不同。这里的描述与使用 ArduCopter 实现的方法一致。
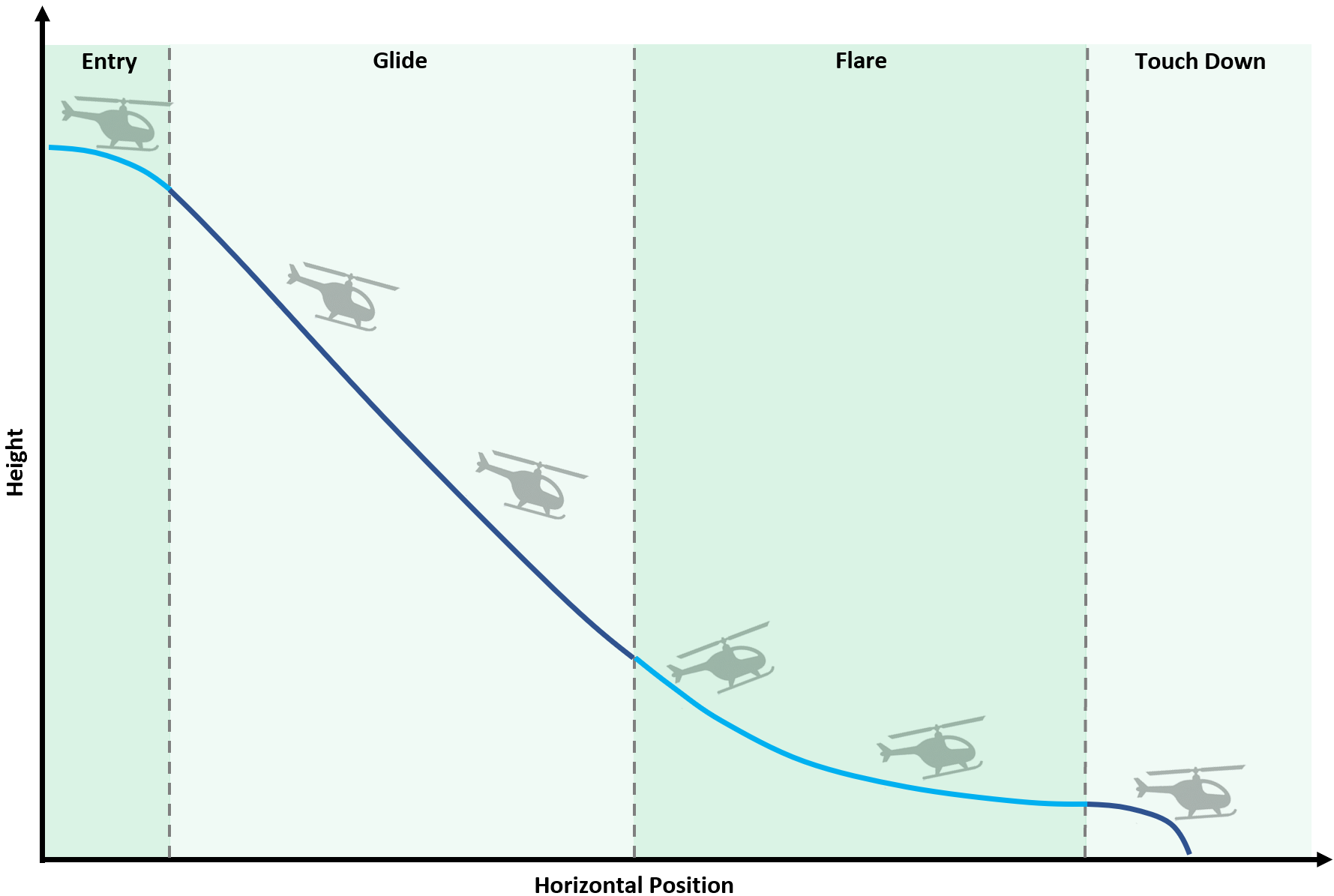
自动旋转分为四个阶段:
1.入场 - 在飞行器的初始动作中,集电极用于最大限度地减少头部速度损失,而旋翼则用于姿态控制,以保持或开始增加前进空速。
2.滑行 - 进入阶段的延续,在这一阶段中,集体加速用于管理头部速度,而循环加速用于管理空中速度。在这一阶段,飞机可以在滑翔范围内缓缓导航,以达到最合适的着陆区域。
3.照明弹 - 在接近地面时,这一阶段的动作旨在将空速转化为升力,降低下降速度,并在必要时提高头部速度。这是通过集体和循环的复杂耦合来实现的。
4.点击 - 飞行器利用旋翼头部剩余的能量缓缓着陆。旋翼头的速度通过集体管理转化为推力,旋翼则用于保持着陆姿态。
下图说明了这四个阶段。下面将对每个阶段进行详细说明。
进入阶段¶
如果没有足够的动力维持飞行,旋翼飞行器就会下降。下降的飞机可以利用相对向上流动的空气来驱动主旋翼。这就是自动旋转的本质。如下图所示,左侧图像显示了正常动力飞行时旋翼力产生的简化视图。然后可以将其与右侧的图像进行比较,后者显示了在自动旋转滑行时产生的力。
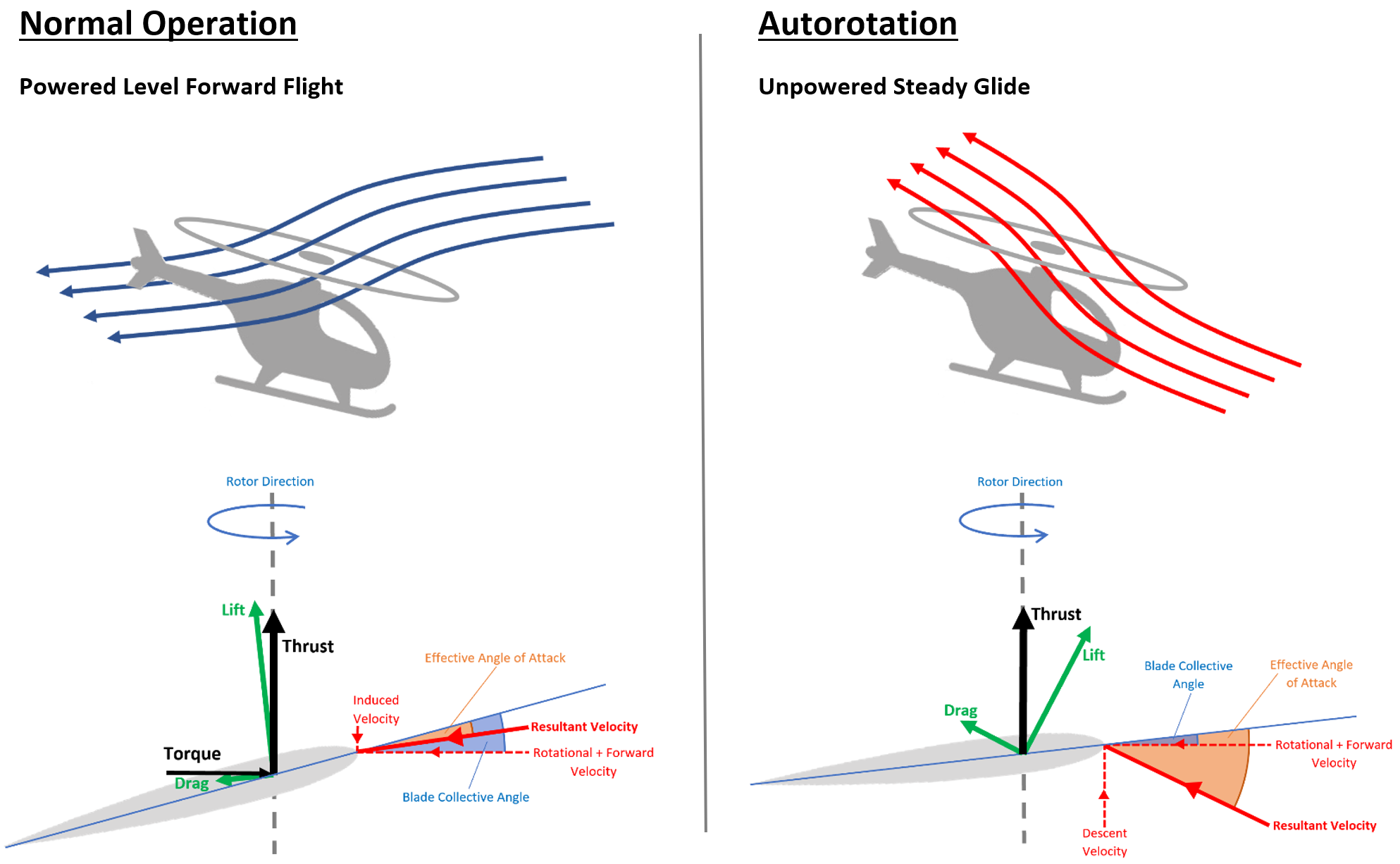
这两种情况的主要区别在于垂直速度的反转。正是这种垂直速度的反转要求在进入自动旋转时进行谨慎的集合管理。这样做的目的是减小叶片集合角,降低叶片失速的风险。关键是要根据所产生的速度矢量的方向成比例地移动集合角,以最大限度地减少所产生的叶片阻力,防止头部速度的过度损失。随着下降速度的增加,升力矢量会自然地向叶片前缘旋转,为保持转子转速提供动力。
除此之外,还必须保持或提高前进空速(如果故障是从低空速状态开始的)。这是通过循环控制来实现的。
滑行阶段¶
这一阶段的机动类似于固定翼飞机的滑翔飞行。前进空速是高效飞行所必需的,它将提高旋翼飞行器的航程,增加找到合适着陆区的可能性。重要的是在滑翔阶段尽可能有效地保持飞机能量,以便在耀斑和着陆阶段获得最大能量。
在这一飞行阶段,可以使用小倾角和低偏航率将飞机引向合适的着陆区,并在可能的情况下转向迎风着陆。
耀斑阶段¶
这是在自动旋转过程中实现良好着陆的最关键阶段。这里的目标是
降低垂直下降速度。
将前进空速转换为主旋翼升力。
在靠近地面的地方进行操作,以尽量减少着陆阶段所需的高度损失。
旋翼用于使飞机机头上仰。这样做可以改变主旋翼看到的有效攻角。这既增加了升力,又使升力矢量向叶片前缘旋转。因此,桨叶升力的更大部分可用于驱动主旋翼,为着陆阶段提供更多能量。此外,耀斑中产生的较大升力和阻力有助于飞机减速准备着陆。集电极随后用于管理头部速度,根据需要防止超速和叶片失速。在这一飞行阶段,向着着陆过渡时,气流方向再次逆转,旋翼再次开始产生向下的诱导气流。
由于该动作贴近地面飞行,因此需要可靠的高度估计,并能考虑到当地地形。因此,强烈建议使用向下的 LiDaR。
触地阶段¶
最后,飞机现在接近地面,前进和下降速度较低,可以缓缓降到地面。这是利用主旋翼剩余的能量来产生/维持诱导流。随着主旋翼能量的消耗,其速度将减慢,这意味着需要施加越来越多的正集流以维持所产生的推力。因此,飞机必须在头部速度过慢导致叶片失速之前着陆。自动旋转的这一阶段在很大程度上取决于主旋翼头部可存储的能量。因此,惯性较大的主旋翼由于储存能量的能力较强,相对更容易实现自动旋转。这也是大型遥控旋翼飞行器比小型旋翼飞行器更容易自动旋转的原因之一。
保释阶段¶
跳伞阶段不属于 "标准 "自动旋转的一部分,它是为了在调整飞行模式时恢复飞机,或在临时动力故障排除后恢复动力时(例如,扭结的燃油管重新变直)而创建的。当退出自主自转飞行模式时,飞机将返回到 "非手动集体模式"。因此,有必要轻柔地重新引入 z 位置控制器,以防止施加过大的集合角,从而导致叶片失速甚至旋翼停止。
启动后,跳伞阶段将从操作员的油门杆位置读取所要求的爬升或下降速率。然后,飞机将在设定的时间内减速(参见参数 AROT_BAIL_TIME)。在这段时间结束时,所要求的垂直速度将与操纵杆上所要求的幅度一致。这一阶段所花费的时间通常为两秒左右。小型旋翼飞行器(550 型及以下)可能需要将这一时间延长至三或四秒。在决定/调整时,保守的做法是选择较长的时间,并在较大的恢复高度余量下开始练习跳伞。
备注
在保送期间,由 H_RSC_RAMP_TIME 定义的电机斜坡时间将被忽略,并使用硬编码的 1 秒斜坡时间。
警告
H_RSC_RAMP_TIME 所定义的斜坡时间现在只有在飞机着陆且 "着陆标志 "设置为 true 时才会被观察到。一旦飞机着陆,ArduCopter 往往需要一秒钟才能记录下来。因此,如果在飞机着陆后立即重新启动联锁,就可以在地面上启动跳伞阶段的一秒斜坡时间。因此,在连续快速运行自动旋转时必须谨慎,以防止旋翼在地面快速升起。
模式设置¶
该飞行模式目前正在开发中。Copter 4.0 仅提供 SITL 模式,供希望测试进入、滑行和跳伞阶段的用户使用。如需了解最新信息,请参阅以下内容 论述主题 .一旦该模式经过充分测试,最终说明将在本维基页面上发布和维护。
模式输入¶
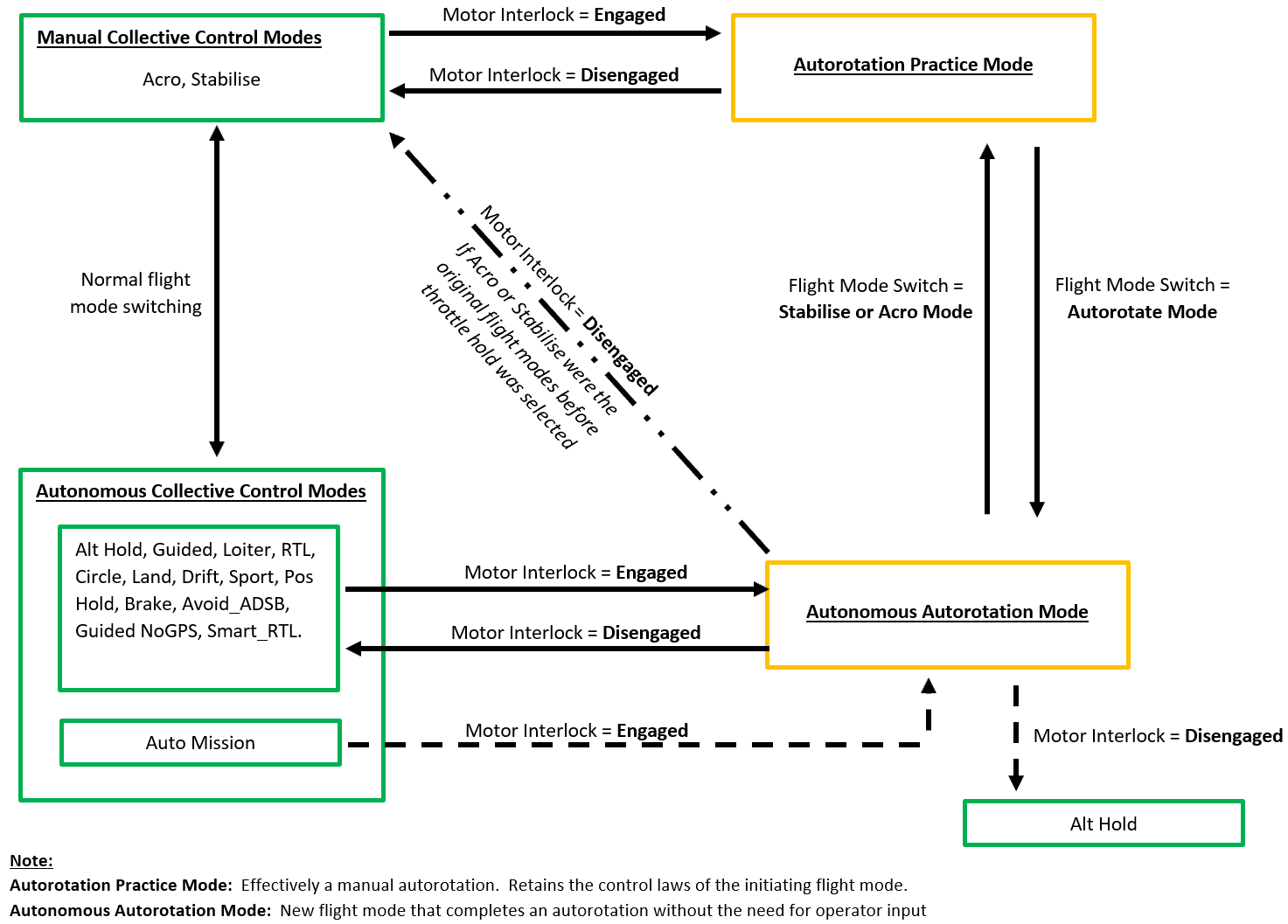
自主自动旋转飞行模式不能像其他飞行模式那样通过模式开关进入。为了模仿手动自转飞行时的自转程序,该模式通过电机联锁开关进入和退出。只有在以非手动集体模式飞行时解除联锁,才能进入自动飞行模式。退出自动旋转时,飞行模式将返回到原来的模式(例如:高度保持 ->自主自动旋转 ->高度保持)。唯一的例外情况是飞机从自动飞行任务进入自动自转。在这种情况下,模式将退出高度保持。这样做是为了防止飞机可能恢复自动飞行任务并飞离原点更远,因为在这种情况下,飞机已从断电中自主恢复,因此再次断电的风险很高。
下图说明了模式切换结构:
设置支持¶
如需任何设置建议,请在此 讨论区.