投掷模式¶
这种略带危险的飞行模式允许飞行员将飞行器抛向空中(或将飞行器扔下),以启动发动机。一旦升空,该模式不接受飞行员的任何输入。该模式需要 GPS。
警告
谨慎使用!接近上膛多旋翼飞行器是非常危险的,因为需要抛掷飞行器。建议尽可能正常起飞,而不是使用投掷模式。
如何使用¶
解除旋翼飞行器上膛
切换到投掷模式
检查 GPS 指示灯是否为绿色
启动旋翼飞行器,听准备就绪(如果载具有蜂鸣器)。默认情况下电机不会旋转。
拾起飞行器并将其向上抛离你的视线(飞行器必须以每秒 50 厘米的速度爬升,总速度达到每秒 5 米)
飞行器停止后,将飞行模式切换为 "闲置"(或其他模式),重新进行手动控制
当飞行器到达飞行轨迹的顶点时,电机应该启动。电机启动后,这种飞行模式将首先尝试控制姿态(返回水平面并停止旋转),然后停止下降,最后尝试停止水平移动。
设置¶
THROW_TYPE设置:如果将载具抛起,则设置为 0;如果将载具落下,则设置为 1。如果是投掷,则从至少 10 米的高度投掷。
throw_mot_start:控制电机在等待投掷时是否缓慢旋转(0 = 停止,1 = 缓慢旋转)。默认值为 0(上膛后不旋转)。
THROW_NEXTMODE:飞行器停止后将切换到该飞行模式(支持自动、制导、RTL、着陆和制动)。设置为 "抛掷"(默认),则只需保持抛掷模式,等待飞行员手动切换模式。
THROW_ALT_MIN 和 THROW_ALT_MAX高度限制: 设置抛掷模式发射的高度限制。启动后,抛射高度必须高于原点的最低高度,低于原点的最高高度。这对飞机或气球投放发射非常有用,可以在地面上膛以建立原点高度,然后在副释放飞行器中上升并下降到发射高度。
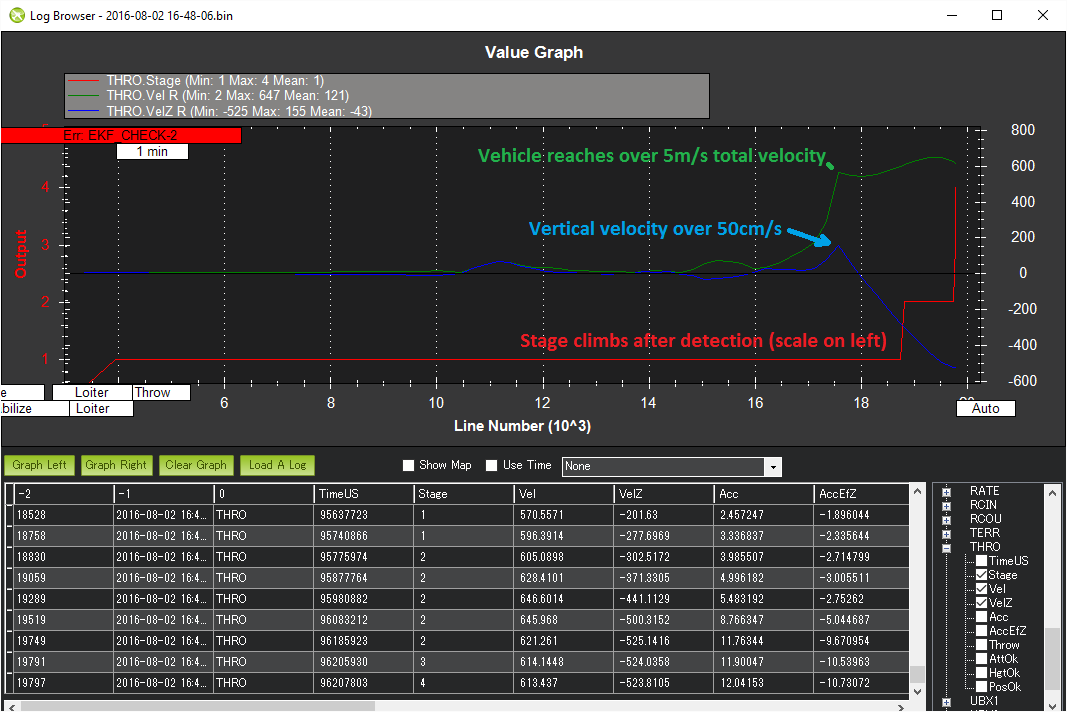
日志分析¶
在抛掷过程中,THRO 信息会被写入 数据闪存日志.如果在抛掷过程中电机无法启动,这些数据有助于诊断问题。下图显示了一次成功的抛掷,总速度超过 5 米/秒,垂直速度超过 0.5 米/秒。