Acro 模式¶
Acro 模式使用遥控摇杆控制旋翼飞行器各轴的角速度。松开摇杆,飞行器将保持当前姿态,不会恢复到水平状态(姿态保持)。Acro 模式适用于特技飞行,如空翻或翻滚,或需要平稳快速控制的 FPV。提高 ins_gyro_filter 但在重新飞行稳定调整之前,必须设置适当的谐波带阻滤波器以防止噪音影响。参见 利用动态谐波带阻滤波器管理陀螺仪噪声 了解更多信息。
可以通过设置 ACRO_OPTIONS 为一。在这种模式下,姿态仍会进行开环校正,类似于尾部陀螺仪的 "航向保持",但姿态会随时间漂移。
概述¶
油门是完全手动的,不对飞行器的倾斜角度进行补偿。如果驾驶员将油门完全踩下,电机将进入最低转速,稳定功能也将停止。 空气模式
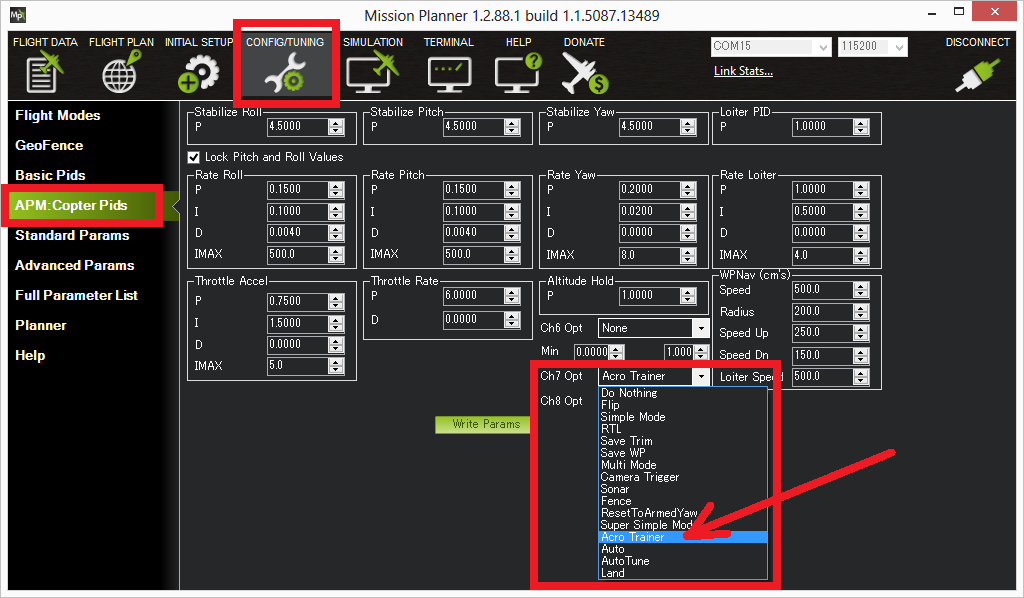
Copter 包括一个 Acro 教练功能,可以打开/关闭,让学习 Acro 飞行变得更容易。
摇杆输入在 "车身框架 "中进行解释(而在运动模式中,摇杆输入在 "地面框架 "中进行解释)。当载具倾斜时,"车身框架 "和 "地面框架 "之间的区别最为明显。例如,当向前倾斜 45 度时,如果使用的是 "大地框架 "控制器(即 "运动 "模式),则在施加左偏航时,飞行器会在航向发生变化时保持俯仰角和滚转角。使用 Acro 等车身框架控制器时,它将围绕载具的垂直轴旋转,这意味着俯仰角将变为滚转角,滚转角将变为俯仰角。
警告
Acro 是最难掌握的飞行模式,在掌握窍门之前,您可能会多次坠机。虽然 Acro 模式并不一定需要 GPS,但在紧急情况下切换到 RTL 模式则需要 GPS。请确保您在启动前有一个可靠的位置估计,最常见的是由 3D GPS 定位和足够的 HDOP 提供。
以上视频采用 ACRO 模式拍摄,使用了 FPV 护目镜.
空气模式¶
Acro 模式可设置为在空转油门时提供完全稳定。参见 空气模式
水上芭蕾教练¶
"这款" ACRO_TRAINER 参数可设置为
0 = 禁用。这意味着飞行员可以完全控制速率,(飞行)控制器不会自动调平或限制角度。
1 = 自动调平。当驾驶员松开操纵杆时,载具将自动恢复水平。返回水平面的力度可以用 ACRO_BAL_ROLL 和 ACRO_BAL_PITCH 参数。默认值 1.0 将使它以最多 30 度/秒的速度恢复到水平。数值越大,恢复速度越快。
2(默认)= 自动找平并限制倾斜角度。包括选项 1 的自动调平功能,但载具倾斜角度不会超过 45 度(该角度可使用 最大角度 参数)。
可以通过 Ch7/Ch8 开关或通道设置启用/禁用训练器。 RCx_OPTION 参数。使用 3 位开关时,关闭位置(即 PWM <1200)将禁用训练器,中间位置将启用选项 #1(自动调平),顶部位置(即 PWM >1800)将启用选项 #2(调平和倾角限制)。如果使用 2 位开关,则只能使用选项 #0(禁用)和选项 #2(调平 & 受限)。
传统旋翼飞行器¶
对于传统旋翼飞行器,该模式的操作方法相同。不过,经验丰富的飞行员可能会发现,该模式略有机器人的感觉,而且在从滑橇上升起时会出现姿态跳跃,这些都是他们所不熟悉的。在 Copter-4.0 及更高版本中,引入了 "虚拟飞杆 "功能,可模拟飞杆旋翼飞行器的经典感觉。通过设置 ACRO_BAL_ROLL 和 ACRO_BAL_PITCH 参数为非零值时,该功能就会生效。
如果旋翼飞行器没有快速获得当前姿态,如坐在地面上但正在输入操纵杆时,虚拟飞行条将为姿态控制器添加衰减项,以消除当前姿态与累积指令姿态之间的累积差值。否则,当旋翼飞行器滑行结束时,它将跳转到累积指令姿态,这可能会出人意料。这对多旋翼旋翼飞行器飞行员来说并不陌生。
值为 ACRO_BAL_ROLL 和 ACRO_BAL_PITCH 参数 ~ 2,通常会产生良好的效果。
备注
当 ACRO_TRAINER 处于活动状态
飞行稳定调整参数¶
ACRO_RP_RATE 控制滚轴和俯仰轴的旋转速率。默认值为 4.5,将指令 200deg/sec 的旋转速率。数值越大,旋转速率越高,数值越小,旋转速率越慢。
ACRO_Y_RATE 控制偏航轴的旋转速率。默认值为 4.5,与滚转和俯仰一样,将以每秒 200deg 的速度旋转。
ACRO_RP_EXPO 和 ACRO_Y_EXPO 是应用于飞行员操纵杆输入的指数量,仅适用于 ACRO 模式。默认情况下,ACRO 模式的反应要比其他模式灵敏得多,即使在中心杆位置也是如此,因此该参数允许飞行员微调控制杆的反应,以匹配他们在稳定、AltHold、PosHold 等其他模式下的感觉。默认值 0 对飞行员的滚转和俯仰要求进行 30% 的扩展。
高级飞行稳定调整参数¶
在对 ACRO 模式的飞行非常有信心之后,您可能希望根据飞行器的性能特征对其进行更深入的调整。这些参数只能由高级用户进行调整,目的是在您确信已经调整得非常好的飞行器上进行快速翻滚或翻转机动后消除 "反弹"。请注意,这些参数是全局参数,适用于所有飞行模式,而不仅仅是 ACRO。
atc_accel_r_max 和 atc_accel_p_max:滚动/俯仰轴的最大加速度,单位为厘米/度/秒/秒。假设您有一架高度灵活的四旋翼飞行器,您的 ACRO_RP_RATE 参数设置为 9,即滚转请求为 ~400deg/sec。在没有短暂加速的情况下,飞行器无法从 0deg/sec 达到 400deg/sec。在此期间,控制器会产生误差,以便让您达到 400deg/sec。当您松开摇杆时,误差仍然存在,从而导致预期姿态过冲,随后出现反弹。可以对该参数进行调整,以帮助消除机动过程中的误差,即使不能消除反弹,也能减弱反弹。需要注意的是,这与调整俯仰和横滚的速率 D 项完全不同,只有在正确调整了这些项之后才能进行调整。
atc_accel_y_max:偏航轴的最大加速度,单位为厘/degress/sec/sec。原理与
atc_accel_r_max和 ATC_ACCEL_P_MAX: 最大俯仰加速度 但在 YAW 轴上,根据 ACRO_Y_RATE 参数值(很可能是一个更低、更容易达到的值。)atc_thr_mix_man:姿态和油门控制之间的平衡。该值可以增加,以改善节流阀关闭时的姿态控制,从而获得更好的气动模式操控性,但在增加该值之前,必须先进行稳定的调整。