皮托管考虑因素¶
空速传感器的精度在很大程度上取决于皮托管和静态端口的位置和结构。对于不以接近失速速度运行的载具来说,空速精度并不那么重要,坑道/静态端口的配置和位置也不那么关键,但仍需遵循一些基本准则。
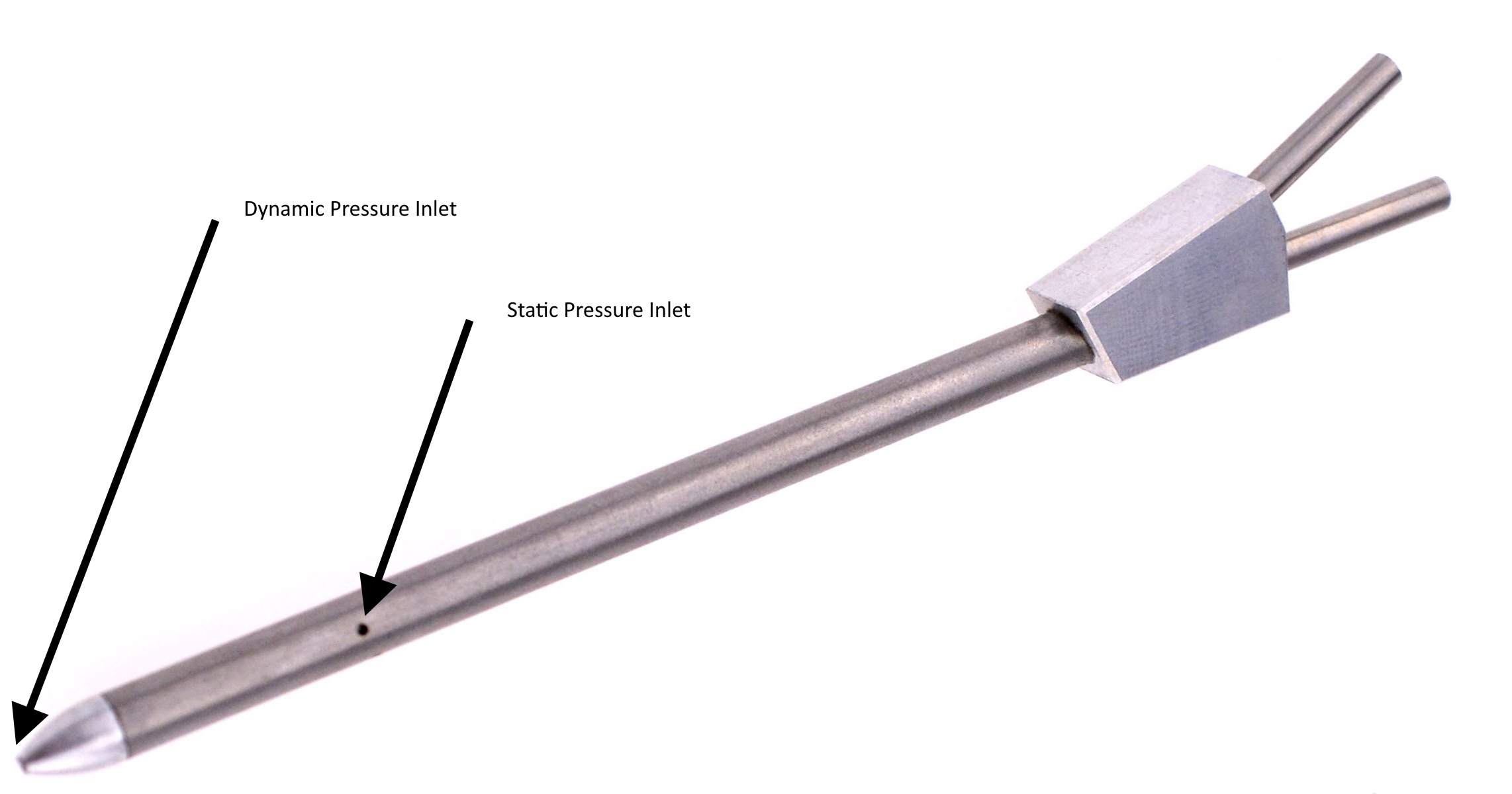
皮托管动态压力输入/静态端口¶
空速传感器的工作原理是测量面向载具相对风向的动态端口与测量一般盛行气压的静态端口之间的压差。通常,这些端口都安装在一根皮托管上。
应将皮托管放在载具上,以便:
动压端口和静压端口不会受到螺旋桨或飞机表面(机翼边界层、前缘压力前沿、相机产生的旋翼等)产生的湍流影响。
端口的位置不应受飞行器在正常运行速度范围内攻角变化的影响。例如,安装在飞机机头顶部的机身上,会随着飞行攻角的增加而 "覆盖 "传感器,导致读数不准确。
理想的位置应远远超出飞机机头或机翼前缘,如下图所示:

但这确实会带来操作和 "绊倒 "的危险,必须予以容忍。不过,这样的定位对于在失速点附近运行的载具非常重要。
对于飞行速度通常远高于失速点(25%-30% 速度余量)的运动型飞机来说,如下图所示的机身位置更为实用,但缺点是在急转弯和全功率爬升等情况下会出现一些(通常可以接受的)速度读数变化。

这架飞机远离螺旋桨冲刷,远离导致机身特征的湍流,远离表面边界层流,但在滑动转弯时仍会受到机身遮挡,这可能会导致一些误差,但对于这种在失速点以上运行的运动型飞机来说,这并不是问题。
皮托管堵塞¶
许多通常与商用空速传感器一起提供的皮托管的动压口非常小。在雨、云或浓雾中,水滴很容易堵塞端口,导致传感器读数非常不准确,或者 AduPilot 宣布传感器故障。在这些环境中运行时,请务必使用专为这些条件设计的皮托管。
机舱静态端口¶
一些待飞飞行器使用内部座舱静态端口来安装空速传感器,而不是将其放置在外部皮托管上。这种方法有时可以提供足够的结果,但如果传感器所在的座舱在飞行过程中受到压力变化的影响(即座舱开口直接暴露在气流中)或配置(即机头或机腹摄像头拆除后暴露在机身开口中),则很容易导致读数不准确。因此,通常不建议采用这种配置,尤其是在自动降落过程中使用空速传感器时。
攻角对座舱压力的影响(以及推断空速读数的准确性)可以通过检查不同速度下的 BARO.Alt 与 GPS.Alt 日志读数来检查,因为 BARO 是根据座舱压力来测量高度的。