建造飞艇¶
建造室内有鳍飞艇¶
这种飞艇有四个由伺服器驱动的拍翼,可实现 X、Y、Z 和偏航控制,而摆锤稳定性可使滚动和俯仰接近零。
这些说明专门用于制作一个直径约 50 厘米的球形飞艇,尽管部件的尺寸可以调整,以制作同类型的更大飞艇。这种大小的气球可提供约 50 克的升力(不包括升起封套本身所需的升力)。
部件¶
(飞行)控制器。这是最复杂的部分,因为有非常特殊的限制。由于重量限制很低,一般的高端(飞行)控制器都不适合,因为它们太重了。最合适的(飞行)控制器是单 PCB 类型的,如 Matek F405-STD,它已经在 Blimp 上进行了广泛的测试。它包括一个 microSD 卡插槽,具有良好的遥控输入和 pwm 输出,这使它非常方便,尤其是在开发过程中,但它仍然重达 9 克。使用像这款(飞行)控制器这样设计成由 5v 而不是电池供电的(飞行)控制器是最佳选择,因为可由电池供电的(飞行)控制器通常需要至少 2S 或 3S 的电压,而唯一足够小的伺服器只能在 5v 或更低的电压下运行。还有一些重量接近 2-3 克的其他(飞行)控制器,可以增加有效载荷,不过它们一般都有一个数据闪存芯片,而不是 microSD 卡插槽(除其他外),这就不太方便了。 本页 进一步介绍了 ArduPilot (飞行)控制器的注意事项。
装有氦气的信封。约 50 厘米的球形铝箔派对气球非常适合在室内使用。
四个伺服器。建议使用 1.7g 微型伺服器。
约 1-2 毫米厚的轻木薄片和用于制作鳍的塑料冷冻袋。
非常细的电线
电池。对于这种尺寸的飞艇,一般最适合使用 150-300mAh 1S 电池。
遥测模块。遗憾的是,通常的 SiK 遥测模块对于这种情况来说太重了。最小版本的 ESP8266 模块,如 ESP-01 或 ESP-07 最为合适。
对于遥控来说,同样需要找到一个小巧的遥控接收器。OrangeRx Nano DSM2/DSMX 接收器是一个不错的选择,因为它只有 0.5 克重。
一个 5V 升压稳压器,用于从 1S 电池为(飞行)控制器供电。在测试中发现,(飞行)控制器可以直接从电池供电,但在 3.6V 左右就会出现褐变(即由于电压过低而反复重启),这意味着如果不使用其中的一个,就无法使用电池的全部容量。
布线¶
添加 5V 升压转换器是为了让(飞行)控制器能够使用 1S 电池。它的输入直接来自电池,输出则连接到(飞行)控制器的 5v 引脚。
如果使用 MatekF405-STD (飞行)控制器,则遥控接收器由(飞行)控制器上的一个 4.5 伏引脚供电。否则,可以使用电路板上的任何 5v 引脚。这是因为当(飞行)控制器通过 USB 供电时,4.5 伏引脚也会供电,因此可以在不连接电池的情况下进行设置和遥控校准。接收器的输出连接到(飞行)控制器的 RX2 输入。
Wi-Fi 模块直接由电池供电。其 TX 和 RX 引脚与(飞行)控制器上的 RX3 和 TX3 引脚相连。
四个舵机连接到电路板上的四个舵机/电机输出端,由电池直接供电。
制作鳍片¶
从轻木薄片上切下 8 条 185 毫米乘 5 毫米的木条。确保顺着纹理切割。
用超级胶水将两条木条的两端粘成 90 度,形成一个直角三角形。
对另外 6 条进行重复。
用塑料剪出与木框大小相同的三角形。
将塑料粘在木框上。斜边将保持松动。粘合时尽量将塑料拉平,但不要使木框变形。
将 90 度连接点粘在三角形的一角,也就是将两根木条粘在一起的地方。
请参阅下面的示例照片:

将所有内容整合在一起¶
舵机需要以特定的方向连接,才能使带偏移的拍动正常工作。具体如下,方向是指从 90 度直视舵机和气球:
前后伺服器的方向是侧向的,这样当伺服器移动时,鳍片就会上下翻动。
前伺服:伺服机身左上方的输出齿轮。
后伺服:伺服机身右上方的输出齿轮。
左右舵机的方向是直立的,这样当舵机移动时,鳍就会从左到右扇动。
左伺服:伺服机身右上方的输出齿轮。
右伺服:输出齿轮位于伺服机身左上方。
请参阅下面的照片,了解每个伺服器的方向:
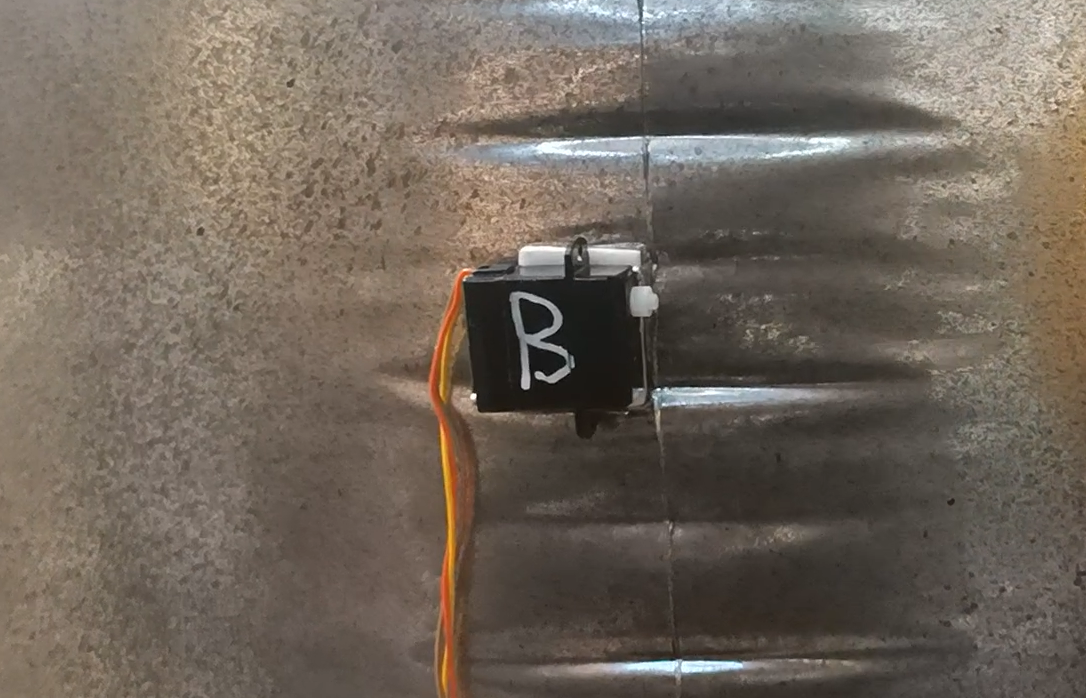
后鳍伺服器 |
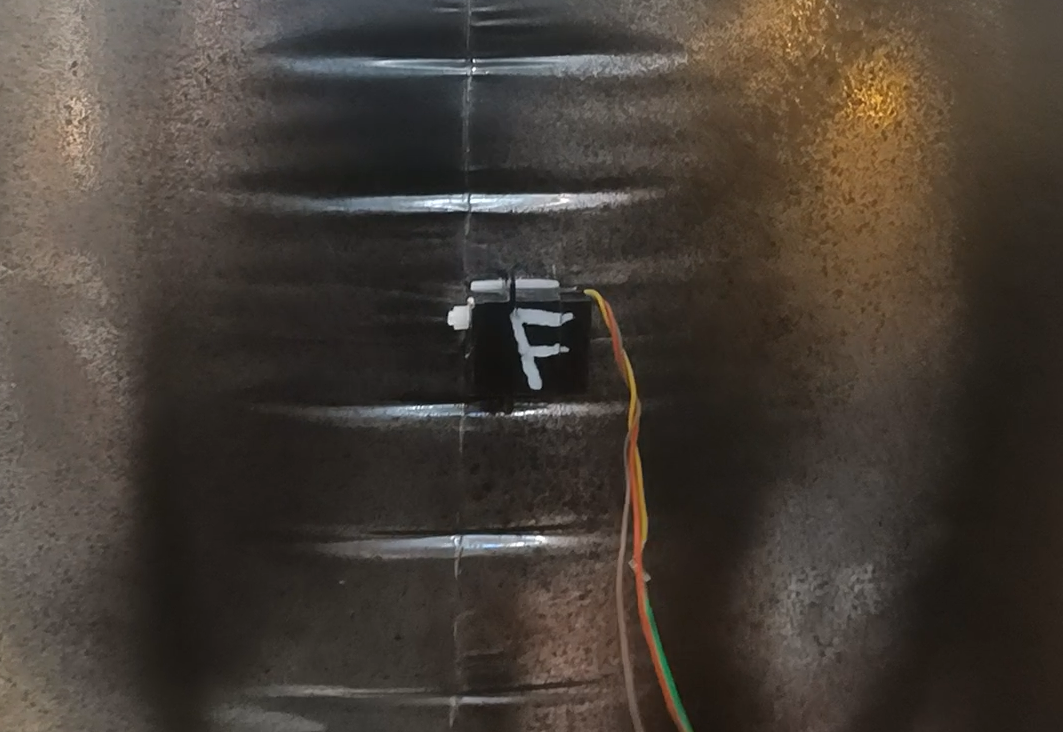
前鳍伺服器 | |

左鳍伺服器 |

右鳍伺服器 |
现在可以将舵机角粘在鳍上,以便与舵机连接。粘接时要注意,鳍与舵机机身之间要有足够的间隙,以便舵机能够充分活动。对于照片中的鳍和舵机,最好将舵机角粘在舵机上,这样当连接到舵机时,鳍的木头位于舵机输出齿轮更靠近边缘的一侧。
